-

浔之漫智控技术(上海)有限公司
主营:西门子PLC代理商,西门子PLC模块代理商,西门子中国一级代理商,西门子低压电器总代理商,西门子DP通讯电缆代理商,西门子中国总代理商

浔之漫智控技术(上海)有限公司
主营:西门子PLC代理商,西门子PLC模块代理商,西门子中国一级代理商,西门子低压电器总代理商,西门子DP通讯电缆代理商,西门子中国总代理商 15
15
西门子电源模块6SL3130-6TE23-6AA3
阻隔度是指光分路器的某一光路对其他光路中的光信号的阻隔能力。在以上各目标中,阻隔度关于光分路器的含义更为严重,在实践系统使用中往往需求阻隔度达到40dB以上的器件,否则将影响整个系统的功用。
另外光分路器的稳定性也是一个重要的目标,所谓稳定性是指在外界温度改变,其它器件的作业状态变时,光分路器的分光比和其它功用目标都应底子坚持不变,实践上光分路器的稳定性*取决于出产厂家的工艺水平,不同厂家的产品,质量悬殊恰当大。在实践使用中,自己也的确碰到许多质量低质的光分路器,不只功用目标劣化快,而且损坏率恰当高,作于光纤干线的重要器件,在选购时必定加以留意,不能光看价格,工艺水平低的光分路价格必定低。
此外,均匀性、回波损耗、方向性、PDL都在光分路器的功用目标中占有非常重要的方位.
平面波导型和熔融拉锥型光分路器现在,光分路器主要有平面光波导技术和熔融拉锥技术两种。
1.平面波导型光分路器
PLC由一个光分路器芯片和两头的光纤阵列耦合组成,采用半导体技术,工艺稳定性、*性好,损耗与光波长不相关,通道均匀性好,结构紧凑体积小,大规模产业化技术老练。
2.熔融拉锥光纤分路器
熔融拉锥技术是将两根或多根光纤捆在一同,然后在拉锥机上熔融拉伸,其间一端保存一根光纤(其他剪掉)作为输入端,另一端则作多路输出端。
3.两种器件功用的比较a)作业波长
平面波导型光分路器作业波长达到1260~1650nm,覆盖了现阶段各种PON所需求的波长。拉锥型光分路器可根据需求调整波长到1310nm,1490nm,1550nm等,工艺较复杂,而且工艺控制欠好,跟着作业时间和温度的改变,插损会发生改变。b)分光均匀性平面波导器件的分光比由于半导体工艺的*性高,器件通道的均匀性非常好。拉锥型分路器的分光比均匀性差,但拉锥型分路器分光比可变是此器件的。c)温度相关性TDL。
平面波导器件作业温度变量较小;拉锥型分路器刺进损耗随温度改变较大。d)本钱按现在的出产本钱,1×8是临界点,1×16以上PLC性价比明显占优,1×4以下拉锥型分路器性价比占优。e)可靠性PLC与拉锥型分路器比较,PLC理论上只需两个交接面存在缺点点,而1×N拉锥型分路器有2N-3个缺点点。

模拟电位器
CPU 221/222 1个
CPU 224/224XP/226 2个
下列技术型CPU 可以提供:
CPU 315T-2 DP,用于使用 PROFIBUSDP进行分布式组态、对程序量有中/高要求、同时需要对8个轴进行常规运动控制的工厂。
CPU 317T-2 DP,用于使用 PROFIBUSDP进行分布式组态、对程序量有高要求、又必须同时能够处理运动控制任务的工厂
下列故障安全型CPU 可以提供:
CPU 315F-2 DP,用于采用 PROFIBUS DP 进行分布式组态、对程序量有中/高要求的故障安全型工厂
CPU 315F-2 PN/DP,用于具有中/大规模的程序量以及使用PROFIBUS DP和PROFINETIO进行分布式组态的工厂,在PROFInet上实现基于组件的自动化中实现分布式智能系统
CPU 317F-2 DP,用于具有大容量程序量以及使用PROFIBUS DP进行分布式组态的故障安全工厂
CPU 317F-2 PN/DP,用于具有大容量程序量以及使用PROFIBUS DP和PROFINETIO进行分布式组态的工厂,在PROFInet上实现基于组件的自动化中实现分布式智能系统
CPU 319F-3 PN/DP,用于具有大容量程序量以及使用PROFIBUS DP和PROFINETIO进行分布式组态的故障安全型工厂,在PROFInet上实现基于组件的自动化中实现分布式智能系统
数字量输入/输出模块具有下列机械特性:
紧凑型设计
坚固的塑料机壳里包括:
绿色 LED,用于指示输入/输出的信号状态
前连接器插座,通过前门保护
前门上的标签区。
连接器针脚分配,用于在前门内部进行配线。
安装方便
模块安装在 DIN 导轨上并通过总线连接器连接到相邻模块。没有插槽规则;输入地址由插槽决定。
当在 ET 200M 分布式 I/O系统中与有源总线模块一起使用时,可以对数字量输入/输出模块进行热插拔,而不会有任何反应。其它模块继续工作
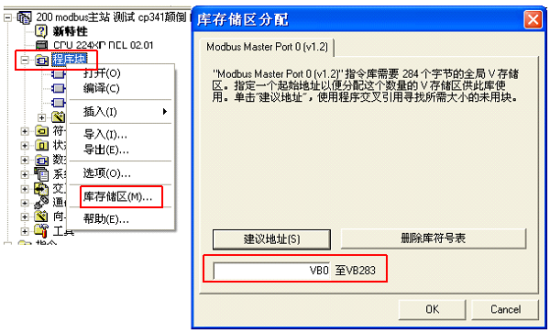
编程和下载:在个人计算机运行编程软件STEP 7 Micro-WIN4.0,首先对电机正反转控制程序的I/O及存储器进行分配和符号表的编辑,然后实现电机正反转控制程序的编制,并通过编程电缆传送到PLC 中。在STEP 7Micro-WIN4.0中,单击“查看”视图中的“符号表”,弹出图所示窗口,在符号栏中输入符号名称,中英文都可以,在地址栏中输入寄存器地址。
3、图符号表定义完符号地址后,在程序块中的主程序内输入如下图程序。注意当菜单“察看”中“√符号寻址”选项选中时,输入地址,程序中自动出现的是符号编址。若选中“查看”菜单的“符号信息表”选项,每一个网络中都有程序中相关符号信息。
4、程序监控与调试:通过个人计算机运行编程软件STEP 7Micro-WIN4.0,在软件中应用程序监控功能和状态监视功能,监测PLC 中的各按纽的输入状态和继电器的输出状态
、电机的正反转控制项目分析表:注意在硬件接线中必须实现互锁!在PLC的梯形图中也应实现互锁。试分析仅在梯形图中实现的互锁能否真正避免电源的短路?有电机的正反转控制项目的基础,可以进一步用西门子S7-200实现小车往返的自动控制。控制过程为:按下启动按钮,小车从左边往右边(右边往左边运动)当运动到右边(左边)碰到右边(左边)的行程开关后小车自动做返回运动,当碰到另一边的行程开关后又做返回运动。如此的往返运动,直到当按下停车按钮后小车停止运动。设计思路:可以按照电气接线图中的思路来进行编写程序。即可以利用下一个状态来封闭**个状态。使其两个线圈不会同时动作。同时把行程开关作为一个状态的转换条件