-

浔之漫智控技术(上海)有限公司
主营:西门子PLC代理商,西门子PLC模块代理商,西门子中国一级代理商,西门子低压电器总代理商,西门子DP通讯电缆代理商,西门子中国总代理商

浔之漫智控技术(上海)有限公司
主营:西门子PLC代理商,西门子PLC模块代理商,西门子中国一级代理商,西门子低压电器总代理商,西门子DP通讯电缆代理商,西门子中国总代理商 15
15
西门子模块6ES7516-3FP03-0AB0参数详细
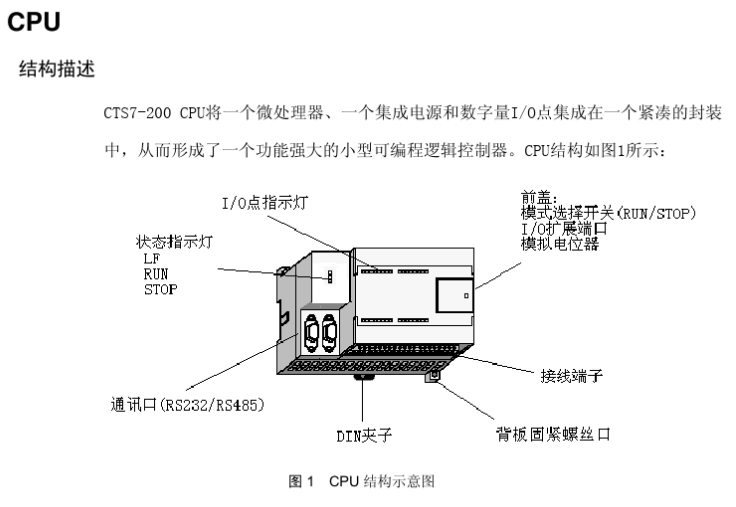
System Fault西门子PLC上面的SF灯红亮时表示系统故障,是英文(SYSTEM FAULT)的缩写,内部寻址错误,**出编程区,模块损坏,插件松动等原因引起。把PLC里的程序先掉,SF 灯还亮估计就是硬件坏了,如果不亮了,就可能你的程序有问题,再在线看看PLC信息S7-300PLC上SF灯亮而BF灯闪烁,肯定是分布式现场总线PROFIBUS-DP通信或DP从站如ABB变频器的问题,不要怀疑其他软硬件问题;PLC带模拟量模块如果有问题,仅仅PLC上SF灯亮(比如具有硬件诊断模拟量模块可以设定模拟量信号断线、**出量程等),而不会引起SF和BF灯同时亮;根据以析,重点检查S7-300PLC的硬件组态与实际硬件是否一致(硬件订货号和固件版本号),DP从站地址设置与组态的地址是否一致;如果组态没有问题,完成硬件组态后,必须执行“保存并编译”,如果没有错误,将产生新的系统数据块,然后下载到PLC中;检查PROFIBUS电缆及其通信连接头是否正确,PROFIBUS电缆中有两根线,一根为红色连接PROFIBUS网络接头的B连接,另一根为绿色与网络接头的A连接(进线分别为B1、A1,出线为B2、A2),不能接反;如果仅有一路电气网段,即从S7-300PLC的X2端口(PROFIBUS-DP端口)出发只有一根PROFIBUS电缆,那么首尾(分别为S7-300PLC和最后DP从站)上网络接头的红色末端电阻必须置“ON”位置,中间DP从站上网络接头必须置“OFF”位置;如果ABB变频器没有通电,而你的硬件组态中包含作为DP从站的该变频器,那么S7-300PLC通电后,没有检测到ABB变频器,所以PLC上SF灯亮,而BF灯闪烁,这是正常现象;一般PLC与触摸屏之间采用MPI通信协议,可以与PLC之间连接在一起同时运行,可以采用无组态的MPI通信、全局数据MPI通信和组态的MPI通信。由于S7-300PLC与触摸屏之间的MPI通信不需要STEP7软件组态,也不需要编写任何程序,只需在触摸屏组态软件上设置一下相关通信参数即可,所以触摸屏有问题是不会引起SF和BF灯亮的;
西门子pLC具有很完善的自诊断功能,如出现故障,借助自诊断程序可以方便的找到出现故障的部件,更换后就可以恢复正常工作。故障处理的方法可参看西门子S7-200PLC系统手册的故障处理指南。实践证明,外部设备的故障率远**PLC,而这些设备故障时,PLC不会自动停机,可使故障范围扩大。为了及时发现故障,可用梯形图程序实现故障的自诊断和自处理。
1. 西门子pLC**时检测
机械设备在各工步的所需的时间基本不变,因此可以用时间为参考,在可编程控制器发出信号,相应的外部执行机构开始动作时起动一个定时器开始定计时,定时器的设定值比正常情况下该动作的持续时间长20%左右。如某执行机构在正常情况下运行10s后,使限位开关动作,发出动作结束的信号。在该执行机构开始动作时起动设定值为12s的定时器定时,若12s后还没有收到动作结束的信号,由定时器的常开触点发出故障信号,该信号停止正常的程序,起动报警和故障显示程序,使操作人员和维修人员能迅速判别故障的种类,及时采取排除故障的措施。
2. 西门子pLC逻辑错误检查
在系统正常运行时,的输入、输出信号和内部的信号(如存储器为的状态)相互之间存在着确定的关系,如出现异常的逻辑信号,则说明出了故障。因此可以编制一些常见故障的异常逻辑关系,一旦异常逻辑关系为ON状态,就应按故障处理。如机械运动过程中先后有两个限位开关动作,这两个信号不会同时接通。若它们同时接通,说明至少有一个限位开关被卡死,应停机进行处理。在梯形图中,用这两个限位开关对应的存储器的位的常开触点串联,来驱动一个表示限位开关故障的存储器的位就可以进行检测

对刚走出校园从事工作时间不长的技术人员热衷于 PLC 解密,想 学习别人程序的编程方法尚可理解,而对一些从事自动化工作多年的人还是痴迷 于 PLC 解密,以偷去别人的程序作为自己技术水平资本的就感到非常的困惑。 我在自动化方面工作多年,已设计了大大小小的工程,编制了不少 PLC 程序, 可至今没有看懂一个别人的程序。不是本人的智能低下,只是思路不同,实在太 累,看不透。 我曾经设计一个的项目,采用西门子 S7-200PLC,编写了一个程序,一名维 护的技术人员不是很好的了解设备工艺,而是痴迷于了解我的程序,我告诉他, 你应该好好的了解设备的状况和工艺,熟悉电气图纸,发现设备的运行状况中哪 些方面还没有满足工艺的要求(也就是程序的不足),自己编写一个,无从下手 时看看资料或者问问我,我保证他三、四个月彻底了解 PLC,贵在实践。到那时, 废掉我的程序。而他却热衷于了解我的程序的每一步,问来问去已达四年多,至 今未能掌握,面对设备、面对 PLC 仍然茫然无从下手,四年意味着一个大学毕业, 意味着一个研究生,甚至一个博士。而他连一个小小的 PLC 都没毕业。如果仅从 了解别人的程序而热衷于 PLC 解密,这个实例,已经告诉你,你已走进误区,成 为一些商家和一些网站的靶子。 何谓 PLC 程序,不过是你设计工程项目的工艺而已,有工艺要求才可能有程 序,程序只是设备工艺的具体反应,了解了工艺要求也就等于了解了程序。编程 不过是个规则,要你用这个规则把设备工艺写出来,因此你重要是了解设备的工 艺和具体使用 PLC 品牌的功能。当你充分了解了设备工艺,设计完电气图纸,你 的设计任务可以说基本完成了,剩下的就是看看 PLC 编程规则,把程序写出来, 把工艺写出来。 记住!贵在实践!在我学习 PLC 时,对梯形图、语句非常了解,也在书上看 过很多程序,可我当**次面对设计时,却不知道如何下手,当把我的程序(问 题很多)输进去并执行时,也就短短的一两天,我的感觉是 PLC 不过如此,海阔 天空的感觉,没有不会的,只有不做的。 我的一个朋友告诉我,他在工厂里,一些设备被一些早进厂的人把持着,PLC 加了密,也不让看程序(程序也不是他们编的),以此压着他们,想让他们水平 **不过他们,我告诉他,他们不过是个永远长不大的丑陋(现在国有企业比 比皆是),莫做他们的继承者,也不要学他们的德性,这种人是较脆弱、是较没 水平的,好好了解一下工艺,了解一下设备的运行状况。自己编一编,不懂问问 学学,这才是他们较怕的。 从设备维护的角度,PLC 是该加密的。但是我们不
各种类型的可编程序控制器 一般集中安装在室或是生产 现场 它们大都处在强 电电路和强电设备所形成的恶劣电磁环境中 所以 要提高 控 制系统的可靠性,一是需要 生产厂家提高 硬件的抗干扰能力 二是需要工程设 计人员充分利用 组态软件来干扰 这样才能有效地增强系统的抗干扰的性能。 控制系统由于具有功能强、程序设计简单、扩展性好、维护方便、可靠性高、能适 应比较恶劣的工业环境的特点 因此在工业企业广泛应用 但是由于工业环境条件恶劣 以 及各种工业电磁 辐射干扰等 影响 控制系统的正常工作 因此必须重视 控制系统 的抗干扰设计 为防止干扰 可以采用硬件和软件相结合的抗干扰方法 防止硬件干扰的方法有 采 用性能优良的电源来抑制电网引入的干扰 电缆的选择与铺设来降低电磁干扰 完善接 地系统 采用光电隔离来抑制输入输出电路引入的干扰等 而利用 软件来减少干扰是 控制系统正常、稳定工作的重要环节 下面主要分析在生产实践中应用的利用 组 态软件来减少干扰的方法 一、减少数字量输入扰动的方法 、计数器法 —计数器 —非门 —复位**触发器 —输入 —输出 —脉冲采样个数 释:当外部有信号输入时,控制系统采集连续的 N 个脉冲使 RS 触发器输出为“1”, 只有当外部输入信号由“1”变成“0”时,RS 触发器的复位端为“1”,将 RS 触发器的 输出复位成“0”。而当有瞬间干扰脉冲时,CON 计数器将采集不到连续的 N 个脉冲,CON 计数器无法输出,这就起到了减少干扰的作用。(N 一般情况下取2) 优点:响应速度快,对周期性的瞬时干扰起到了一定的抑制作用。 缺点:不能**过 CON 计数器采样时间的干扰。 2、延迟输入法 IN—输入 OUT—输出 TIME(ET)—延时时间 TON—延时输出(其曲线如下图) 注释:当输入 IN=1时,启动计数器直到计时时间(PT)=延时时间,OUT=1。当计数 器计时时间〈延时时间,OUT=0。延时时间较好取1S 以内。 优点:了短时的周期干扰。 缺点:响应速度慢,不利于信号的快速传输。 二、减少模拟量输入扰动的方法 1、限幅法 MOVE—移动保持指令(使能端 EN=1,OUT=IN。EN=0,OUT 保持前次值) GE—大于等于指令(OUT=1,IFIN1≥IN2) LE—小于等于指令(OUT=1,IFIN1≤IN2) HL—上限设定值 LL—下限设定值 注释:当模拟量输入信号在 和 之间时, 。当 信号**出或等于 或 时, 或 判断 信号,使 或 输出“ ”去封锁 ,从 而保持 的输出为 或 的设定值。也就起到了限幅的作用。 优点:能有效克服因偶然因素引起的脉冲干扰。 缺点:平滑度差。 、延迟滤波限幅法 —移动保持指令(使能端 , 。 , 保持前次值) —大于等于指令( , ≥ ) —小于等于指令( , ≤ ) —上限设定值 —下限设定值 —延迟滤波指令(其曲线如下图) —延迟滤波时间 注释:功能基本和限幅法相同,只是在输入端增加了一个延迟滤波器,对输入信号 起到了延迟缓冲的滤波。 优点:有效地抑制了周期性的脉冲干扰。平滑度比限幅法有所改善。 缺点:信号响应速度减缓。 、延迟滤波比较法 —延迟滤波器 —减法指令 —**值指令 —大于等于指令 —较大偏差值 —延迟滤波时间 注释:正常情况输入信号 经过一阶延迟滤波后直接输出, 的值; 当有突变信号时,输入信号 经过一阶延迟滤波后与含有突变信号的输入信号 相减取**值(无论出现正偏差还是负偏差),与 值比较,若大于等于 的预设值, ,将 —延迟滤波器切换成跟踪状态,此时 就保持了输入信号 突变 前的值。直到突变信号减弱, , 。 优点:对周期性干扰具有良好的抑制作用。平滑度高。 缺点:灵敏度取决于 —延迟滤波时间的大小。 、积分消抖滤波法 —延迟滤波器 —减法指令 —大于等于指令 —小于等于指令 —或门(自做的 功能块) —非门 —延时输出 —异或门 —移动保持指令 —比例积分调节器 —较大正向偏差值 —较大负向偏差值 —延迟滤波时间 —延迟输出时间 —延迟滤波时间 注释:参数设置: ( ), ( ), ( ), , , ( ,将 放开封锁成为纯积分调节器) 一、小信号在变化幅度中变化时 、较终状态:此时为稳态,输入与输出相近。 输出为“ ”, , 时 间已**出 , , 不保持, 不积分, ,信号走 的跟踪回路, 滤波后输出。正常的信号流向: → → 的跟踪→ (滤波 )→输出 、小信号的暂态变化:(在 之前) , , 未到 , , 保持, 积分作用, 未起作用,输出跨越 ( ),直接到输出端, 此时为线性跟踪滤波状态。 二、信号大幅度变化时(≥ ,≤ ) , , 不起作用, ,所以 ( )不起作用, 不起作用走跟踪。正常的信号流向: → → 的跟踪→ 的跟踪→输出 三、总结: 、小信号在 秒之内,经过 ( ), 的积分作用,跳过 ( ), 直接输出,实现输入信号的滤波和跟踪状态。 、小信号在 秒之后,经过 ( ), 的跟踪和 ( )跟 踪输入。 、大信号变化时, ( )作用, ( )不起作用,此时为输 出快速跟踪。 优点:对于被测参数有较好的滤波效果,对周期性干扰具有良好的抑制作用,平滑 度高。 缺点:对于变化缓慢的输入信号响应慢。 结束语 上述所分析的方法,均在生产实际中得到检验,取得了一定的效果,并随着生产实 际的需要和经验的积累,不断完善其对干扰的软件处理方法